Ce robot à six pattes a trouvé une façon plus rapide de se déplacer que les insectes
Ce robot à six pattes a trouvé une façon plus rapide de se déplacer que les insectes
Des chercheurs de l’école polytechnique et de l’université de Lausanne ont mis au point un robot hexapode plus rapide que ses modèles vivants. Mais pas sur tous les terrains.

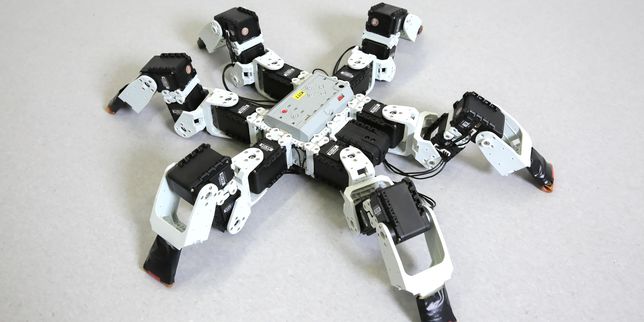
Le robot hexapode (à six pattes) utilisé par les chercheurs de l’école polytechnique et de l’université de Lausanne. | ALAIN HERZOG / 2017 EPFL
Après des millénaires d’évolution, les espèces animales font office de machines ultraperfectionnées. Et pourtant, des chercheurs de l’école polytechnique et de l’université de Lausanne ont réussi à concevoir un robot à six pattes, inspiré des insectes, capable de se déplacer plus rapidement que ses modèles.
Les insectes à six pattes se déplacent « en trépied », ce qui signifie que trois pattes servent d’appui en permanence. Or, le robot conçu par ces chercheurs réussit à se déplacer plus rapidement avec seulement deux points d’appui, expliquent-ils dans un article publié vendredi 17 février dans la revue Nature Communications.
Pour parvenir à ce résultat, ils ont modélisé numériquement une mouche drosophile, dont ils ont testé automatiquement plusieurs types de marche. Les algorithmes, « de type évolutionnistes », ont éliminé au fil des possibilités les marches les moins rapides, pour en arriver à la conclusion que le déplacement « bipode » (sur deux pieds ou points d’appui) était plus pertinent. Ce qui s’est vérifié dans les faits, en programmant deux robots avec chacun un type de marche différent.
L’hexapode se déplaçant en « bipode » est plus rapide. (crédit EPFL)
Les insectes s’adaptent mieux au terrain
Cela signifie-t-il pour autant que la marche des insectes à six pattes soit moins efficace que celle conçue par ces roboticiens ? Pas du tout, expliquent-ils, car la marche développée par leur robot fonctionne à merveille sur le sol plat du laboratoire… mais beaucoup moins sur des terrains plus complexes. « Nos résultats confirment une hypothèse de longue date en biologie, selon laquelle le mode trépied est dû à un environnement en trois dimensions, et à l’adhésivité des pattes », explique Pavan Ramdya, l’un des auteurs de l’étude, sur le site de l’Ecole polytechnique de Lausanne.
Pour aller au bout de leur expérience, dont le but était à l’origine de « comprendre pourquoi les insectes utilisent le déplacement en trépied », ils ont privé des spécimens de leurs systèmes d’adhésion. Résultat : les insectes ont commencé à se déplacer de la même façon que le robot, avec deux points d’appui seulement.