Les futurs drones, entre biomimétisme et bio-inspiration
Les futurs drones, entre biomimétisme et bio-inspiration
Par Jean-Michel Normand
Deux grandes écoles d’ingénieurs, l’ISAE-Supaero et l’ENAC, vont présenter leurs prototypes à Toulouse inspirés d’animaux.

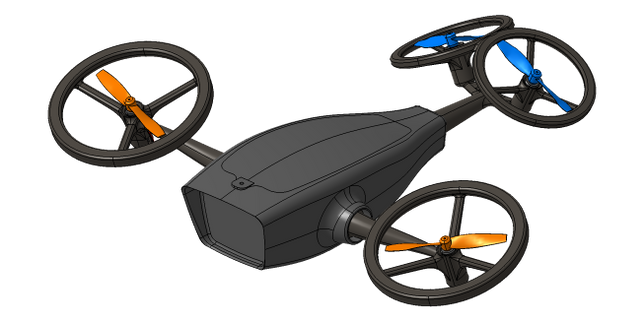
Le drone développé dans le cadre du projet « NARcOTic » de l’ISAE-Supaero. / ISAE-SUPAERO
Un drone qui, tel un albatros, planerait sur des centaines de kilomètres. D’autres qui se joueraient des turbulences avec l’aisance d’un faucon crécerelle, ou battraient des ailes comme le fait une libellule. Consacrée cette année aux drones, la rencontre annuelle entre l’ISAE-Supaero et l’ENAC, deux grandes écoles de l’ingénierie de l’aérospatiale et de l’aviation civile, fait grand cas de la bio-inspiration, voire du biomimétisme.
Le concept de « drone à extraction d’énergie » sera l’une des vedettes de ce « Rendez-vous aéro de l’innovation » qui se tient jeudi 23 mai sur le campus toulousain de l’ISAE-Supaero. Cet appareil entre dans la catégorie des aéronefs « bio-inspirés » et utilise les forces issues des variations de pression liées aux vents pour reproduire la technique de vol des oiseaux.
En récupérant l’énergie produite par les rafales atmosphériques, on pourrait gagner jusqu’à 40 % d’autonomie, selon les chercheurs. Pour « surfer » sur le vent relatif et s’orienter pour maximiser la portance, cette aile volante reçoit de multiples capteurs (sur le modèle des sondes Pitot) qui mesurent les différences de pression atmosphériques. Les données recueillies alimentent le calculateur de vol qui oriente les gouvernes du drone.
« Cette approche ne peut fonctionner que pour les appareils de la taille d’un oiseau et pour un vol relativement lent », précise Jean-Marc Moschetta, professeur d’aérodynamique et directeur de l’activité microdrones de l’ISAE-Supaero. Un démonstrateur a été réalisé pour mener des essais. Précision : les incessants mouvements d’ajustement de l’appareil rendraient le vol insupportable pour les passagers d’un avion qui évoluerait selon cette technique…
Vol du faucon
« Bio-inspiré » lui aussi, le projet NARcoTic (Nano quatri rotors with oriented thrust – « Rotors nano-quatri à poussée orientée ») procède de l’observation du vol d’un faucon appliqué non plus à une aile volante mais à un multicoptère à quatre hélices. La présence de capteurs permet de détecter en temps réel la configuration des vents afin d’adapter le vol aux rafales qui risqueraient de le déséquilibrer et, surtout, de réduire son autonomie. En fonction des données reçues, les deux hélices situées en queue de l’appareil modifient leur orientation.

Le prototype de nanodrone libellule. / ISAE-SUPAERO
Le nanodrone libellule « à voilure battante », développé avec la société Silmach par l’ISAE-Supaero participe, lui, du biomimétisme. Cet insecte électronique qui pèse 0,2 gramme (le poids de deux abeilles) et dispose d’ailes de trois centimètres d’envergure est composé de « matériaux intelligents » dont la forme se modifie sous l’effet d’un courant électrique, ce qui permet de faire vibrer les ailes dans le cadre d’un vol « battu ». Au-dela d’une taille de 20 à 30 cm, précise toutefois Jean-Marc Moschetta, le recours à un rotor devient plus efficace. Ce nanodrone, qui pourrait se glisser discrètement dans un bâtiment par une conduite d’air conditionné, voire par les égouts, se destine à des missions de renseignement pour la Défense.
Un microdrone conçu pour évoluer sur Mars
La rencontre annuelle entre l’ISAE-Supaero et l’ENAC sera aussi l’occasion de présenter le drone Mermoz, doté d’une pile à hydrogène développée par la société singapourienne H3Dynamics. Ce drone d’un peu plus de trois mètres d’envergure, à voilure fixe, tentera en 2021 de franchir l’Altantique en ralliant Saint-Louis du Sénégal à Natal, au Brésil, comme le fit le pionnier de l’aviation en 1930. Un raid de 3 500 km.
Enfin, les deux écoles présenteront le projet Aerobot, un microdrone conçu pour évoluer sur Mars, développé avec le CNES (Centre national d’études spatiales) et l’Onera (Office national d’études et de recherches aérospatiales). Actuellement testé dans un caisson simulant les difficiles conditions de vol à la surface de la Planète rouge (une gravité trois fois moins importante que sur Terre mais une densité de l’atmosphère cent fois moindre), ce drone équipé de deux rotors contrarotatifs doit permettre de guider plus facilement un rover évoluant au sol.